
ÇÖP YİYEN ROBOT YAPILIŞI
Aybars 3B Yazıcı ile yapabileceğiniz bir robot da çöp yiyen robottur. Bu robotu gerekli plastik parçaları yazıcınızdan çıktı alarak, ister evinizde isterseniz okul ortamında kolayca yapabileceksiniz. Bu yazıda çöp yiyen robot yapılışı için gerekli plastik parçaları, mekanik parçaları, elektronik parçaları, kodları yapılış aşamalarını bulabileceksiniz.

GEREKLİ MALZEMELER

3b yazıcı ile basılmış plastik parçalar. Gerekli parçaların dosya isimleri aşağıdaki gibidir.
Kafa.stl
Govde.stl
Elektronik_Kutu.stl
Pil_Yuvasi.stl
Kol.stl
Baglanti.stl
Servo.stl
2 adet m3 15 YSB cıvata
1 adet m3 30 YSB cıvata
1 adet m3 10 YSB cıvata
4 adet m3 somun
2 adet 2.2x6 vida
Dişi-Dişi ve Dişi-Erkek Jumper kablolar
Arduino Nano
SG-90 Servo Motor
HC-SR04 Mesafe sensörü
4 adet AAA kalem pil (ince kalem pil)
YAPILIŞ ADIMLARI
ADIM: SERVO MOTORUN MONTAJI
Bu aşama için Servo motoru, servo motor tutucu plastik parçayı ve gövde parçasını alıyoruz.

Servo motor paketi içerisinden aşağıdaki fotoğrafta görünen beyaz plastik parçayı ve vidaları ayırıyoruz.

Ardından plastik parçayı servo motora fotoğraftaki gibi konumlandırıyoruz.

Bu servo motor ve plastik parçayı gövde içerisine fotoğrafta olduğu gibi motorun beyaz dişli kısmı yukarı gelecek şekilde yerleştiriyoruz.


Servo motoru ve plastiği daha önce servo motorun poşetinden çıkan 2 adet uzun vida ile gövdeye sabitliyoruz.

ADIM : KOL PARÇASINI MONTAJLAMA
Bu aşama için gerekli malzemeler fotoğraftaki gibidir. Bunlar kol parçası, servo motor poşetinden çıkan küçük plastik parça ve iki adet 2.2x6mm vida.

Bu aşamada iki adet vida ile kol parçasını küçük plastik servo motor parçasına fotoğraftaki gibi vidalıyoruz. Vidalama esnasında beyaz plastiğin çıkıntılı olan tarafı iç yöne gelecek şekilde olmalıdır. Çünkü bu kısımla servo motora montajlanacaktır.


ADIM: KOLUN GÖVDEYE MONTAJLANMASI
Bu adım için gereken parçalar fotoğrafta bulunan gövde, kol, m3 15 ysb cıvata ve m3 somundur.

Öncelikle m3 15 somunu fotoğraftaki gibi kol parçasının diğer ucuna geçiriyoruz.

Ardından kol parçasından geçirdiğimiz bu civatayı gövde parçasının sol tarafında bulunan delikten geçiriyoruz ve içeriden m3 somunu takıyoruz. Bu somun çok sıkılmamalşı ve kolun hareket etmesine izin vermelidir. Hemen sonra da sağ tarafta bulunan servo motora koldaki plastik parçayı vidasız olarak takıyoruz. Son hali fotoğraftaki gibi oluyor.

ADIM: MESAFE SENSÖRÜNÜN MONTAJLANMASI
Bu aşamada HC-SR04 mesafe sensörünü gövdede bulunan ve göze benzeyen iki deliğe yerleştirmemiz gerekiyor. Sensörü gövdenin içinden bu deliklere sokuyoruz. Eğer zorlanma olursa delikleri dikketli bir şekilde genişletebilirsiniz. Sensör yerinde durmaz ve çok oynar halde ise silikon uygulayabilirsiniz.


ADIM KAFA KISMININ TAKILMASI
Bu aşamada kafa plastik parçasına, 1 adet m3 30 ysb cıvataya ve 1 adet de m3 somuna ihtiyacımız var.

Kafa parçasının delikli menteşe bağlantısı çıkıntısını gövdedeki iki adet menteşe bağlantısı çıkıntısı arasına getiriyoruz. Ardından m3 30 ysb civatamızı takıyoruz. Diğer tarafına ise somunu çok sıkmadan kolay açılıp kapanacak şekilde takıyoruz. Plastik parçalar hareket etmekte zorlanıyorsa sürtünen yüzeyler dikkatlice yontulabilir.


ADIM KOL BAĞLANTI PARÇASININ MONTAJLANMASI
Bu aşama için bağlantı plastiğine, 2 adet m3 somuna, 1 adet m3 15 ysb ve 1 adet de m3 10 ysb cıvataya ihtiyacınız var.

Plastik bağlantı parçasını servo motor tarafında kol üzerinde bulunan delikli çıkıntıya fotoğraftaki gibi m3 10 ysb cıvata ve somunla çok sıkmadan montajlıyoruz.

Ardından bağlantı plastiğinin diğer ucunu kapak kısmındaki delikli çıkıntıya m3 15 ysb cıvata ve somunla fotoğraflardaki gibi montajlıyoruz



ADIM ELEKTRONİK KUTUSUNUN MONTAJI
Öncelikle 4 adet dişi dişi jumper kablosunu mesafe sensörü pinlerine takıyoruz. Bu sırada da hangi renk jumperin hangi pine bağlandığını not alıyoruz. Ardından bu 4 jumper kablo ve servo motorun kablolarını elektronik kutusunun üzerindeki yuvarlak delikten geçiriyoruz.

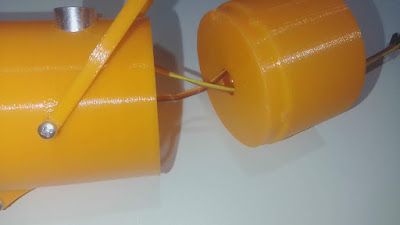
Son olarak elektronik kuttusunu gövdeye bastırarak geçiriyoruz. Bu montajın kolay olması için hem gövdedeki hem de elektronik kutudaki baskı kalıntı ve kusurlarının temizlenmesi gerekebilir.


ADIM: PİL KUTUSUNUN YAPILMASI
Bu aşamada pil kutusu plastik parçasına, bir miktar jumper kabloya ve 4 adet AAA (İnce kalem) pile ihtiyacımız var.

İlk olarak 3 adet jumper kablonun iki tarafını uzunca soyalım. Ardından da bir tarafı dişi olacak şekilde 2 jumper kablonun birere ucunu uzunca soyalım

Bu kabloları fotoğraflardaki gibi pil kutusunun ilgili deliklerinden geçirerek takalım. Bu sırada kabloların pilleri seri bağlayacak şekilde takıldığına dikket edelim. Fotoğrafta görüldüğü gibi atlamalı bağlantı yapmamız gerekecek. Ayrıca bir ucu dişi olan ve diğer ucunu soduğumuz kabloları fotoğraftaki gibi iki uca bağlayalım.
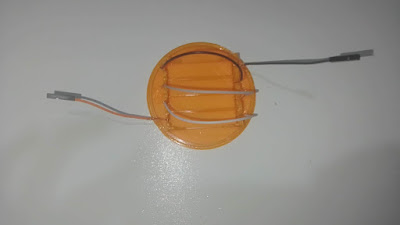

Bu işlemden sonra pilleri + ları plastik üzerinde + yazan yere, - leri ise – yazan yere gelecek şekilde yerleştirelim.

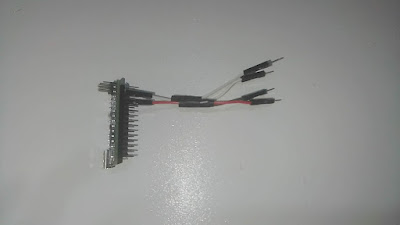
ADIM GND VE 5V KABLOLARININ YAPILMASI
Arduino üzerinde bulunan 5v ve GND pin sayıları bizim için yetersiz kalacaktır. Bu amaçla jumper kablolardan fotoğraftaki gibi iki tane bağlantı kurmamız gerekecek.
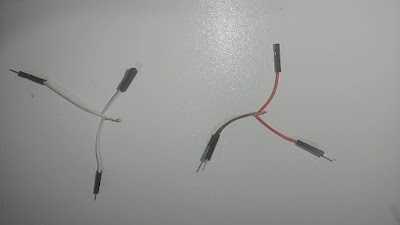
Dişi-Erkek jumper kabloları keserek bu bağlantıyı kurabilirsiniz. Her bağlantıda 1 dişi 2 erkek kablo olduğuna dikkat ediniz. Ardından bağlantı kısımlarını izole bantla kapatabilirsiniz.
ARDUİNO KODUNUN ATILMASI
Aşağıda vierilen Arduino kodunu Arduino Nano’ya yükleyin.
// ÇÖP YİYEN ROBOT KODLARI VE AÇIKLAMALARI
#include<Servo.h>
Servo Servo_Motor;
#define echo 6 // MESAFE SENSÖRÜNÜN echo BACAĞINDAN GELEN KABLOYU ARDUİNO ÜZERİNDEKİ D6 PİNİNE BAĞLIYORUZ
#define trig 7 // MESAFE SENSÖRÜNÜN trig BACAĞINDAN GELEN KABLOYU ARDUİNO ÜZERİNDEKİ D7 PİNİNE BAĞLIYORUZ
// MESAFE SENSÖRÜNÜN GND PİNİNİ ARDUİNONUN GND PİNİNE, VCC PİNİNİ İSE ARDUİNO ÜZERİNDEKİ 5V PİNİNE BAĞLIYORUZ
long sure, mesafe;
void setup() {
Serial.begin(9600);
Servo_Motor.attach(10); // SERVO MOTORDAN GELEN SİNYAL KABLOSUNU (GENELDE SARI OLUR) ARDUİNO ÜZERİNDEKİ D10 PİİNİNE BAĞLIYORUZ
// SERVO MOTORUN KAHVERENGİ KABLOSUNU ARDUİNODAKİ GND PİNİNE, KIRMIZI KABLOSUNU DA 5V PİNİNE BAĞLIYORUZ
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
}
void loop() {
digitalWrite(trig, LOW);
delayMicroseconds(2);
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
sure = pulseIn(echo, HIGH);
mesafe = sure / 58.2;
Serial.println(mesafe);
Servo_Motor.write(130);// BU KOD ROBOT ÇALIŞMAYA BAŞLADIĞINDA ÇÖP KOLUNU AŞAĞI İNDİRMEYE YARAR.
//AŞAĞIDAKİ KODLAR ROBOTUN ÇÖPÜ AĞZINA ATMASINI SAĞLAR
if (mesafe < 10 ) {
delay(1000);
Servo_Motor.write(0);
delay(1000);
Servo_Motor.write(130);
delay(1000);
//AŞAĞIDAKİ KODLAR ÇÖPÜ AĞZINA ATTIKTAN SONRA ÇİĞNEME HAREKETİNİ SAĞLAR
Servo_Motor.write(100);
delay(300);
Servo_Motor.write(130);
delay(300);
Servo_Motor.write(100);
delay(300);
Servo_Motor.write(130);
delay(200);
}
}
//KOD SONU
ADIM: ARDUİNO BAĞLANTISININ YAPILMASI
Arduino ve elektronik komponentlerin bağlantısı aşağıdaki şemadaki gibi olacaktır. Şemada Arduino Uno gösterilmiş olsa da aynı bağlantıyı Arduino Nano için yapmamız gerekecektir.

Öncelikle bir önceki adımda yapmış olduğumuz 5V ve GND bağlantı kablolarını fotoğraftaki gibi Arduino Nano üzerindeki 5v ve GND pinlerine bağlayalım

Ardından Mesafe sensörünün GND pininden gelen, ilgili aşamada not aldığımız jumperi bir önceki aşamada gnd pinine taktığımız erkek jumper ile birleştirelim.
Mesafe sensörünün 5v pininden gelen jumperi ise bir önceki aşamada taktığımız 5v bağlantı kablolarındaki erkek jumper ile birleştirelim.
Mesafe sensörünün echo pininden gelen jumperi Arduino daki D6 pinine takalım
Mesafe sensörünün trig pininden gelen jumperi Arduino daki D7 pinine takalım
Servo Motorun kablolarına fotoğraftaki gibi dişi erkek jumperler takalım

Ardından servo motorun kırmızı kablosundan gelen jumperi 5v kablosundaki jumper ile, kahverenhi kablosundan gelen jumperi de gnd bağlantı kablomuza takalım
Servo motorun sarı kablosundan gelen jumperi ise Arduino üzerindeki D10 pinie takalım
Pil Yuvasının Takılması
Pil yuvasının + kutpundan çıkan junperi Arduino’nun Vin pinine takalım.
Ardından Arduino üzerinde boşta kalan GND pinine uzun bir dişi erkek jumperinin dişi tarafını takalım
Pil yuvasının – ucundan çıkan dişi jumpere ise uzun bir dişi erkek jumperinin erkek ucunu takalım.
Arduinonun GND pinine ve pil yuvasının – ucuna taktığımız jumperleri birbirine bağayınca Arduino, dolayısı ile robotumuz çalışacaktır. Bu pinleri birbirine doğrudan bağlamayıp uzun jumperler kullanmamızın sebebi, bu jumperleri robotun dışında tutup, robotu kapatıp açmak amacıyla kullanmak istememizdir.

Pil yuvasının – ucuna ve arduinonun gnd pinine taktığımız jumperleri elektronik kutusunun yuvarlak deliğinden ve gövdenin arkasındaki yuvarlak delikten geçirerek dışarı alalım.

Son olarak arduinoyu elektronik kutusunun içine doğru itip, pil yuvasını kapak olarak kapatalım.


Fotoğrafta da görünen gövdenin arka deliğinden çıkan iki jumperin birisin arduinonun gnd pinine diğerini pil yuvasındaki – uca bağlamıştık. Bu nedenle nu iki piini birbirine takınca robot çalışacaktır.
ADIM: HAREKET AYARLARININ YAPILMASI
Gövdeden çıkan iki jumper kabloyu birleştirince robot istenilen hareketleri yapmayabilir. Bu nedenle şu aşamaları takip etmelisiniz:
Yeme kolunun ucunda bulunan ve servo motora takılan plastik parçayı çıkartın.

Ardından robotu jumper kabloları birbirine bağlayarak çalıştırın. Bu sırada servo motor boşta dönecektir.
Bir süre bekleyip elinizi mesafe sensörüne yaklaştırın ve çekin.
Servo motor bir süre dönecek ve duracaktır. Elinizi çektikten sonra sensörden en az 30cm uzakta durmalısınız.
Servo motor durduktan sonra jumperleri sensöre yaklaşmadan, arka taraftan sökerek robotu durdurun.
Ardından kolu fotoğrafteki gibi, kapak kapalı olacak şekilde servo motora takın.

Hareketler istenilen şekilde olacaktır. Son olarak servo motor ve plastik vidasını montajlayın.
SON
Çöp yiyen robotunuzu bitirdiniz. Şimdi eğlenerek kullanabilirsiniz. Görüşmek üzere.

NOT: Plastik parçalar https://www.thingiverse.com/thing:3394154 linkinde bulunan tasarımlara revizyonlar ve eklemeler yapılarak yeniden tasarlanmıştır. İlgili tasarımcıya teşekkür ederiz.






